
An Interest In:
Web News this Week
- April 26, 2024
- April 25, 2024
- April 24, 2024
- April 23, 2024
- April 22, 2024
- April 21, 2024
- April 20, 2024
Some of Our Sources
- Engadget
- Web Designer Wall
- Team Treehouse
- Smashing Apps
- Six Revisions
- Naldz Graphics
- Line 25
- Stylized Web
- Web Resource Source
- Android Dissected
Help Webnuz
Referal links:
Black Line Follower with Arduino
In this blog, I will show you how to build a black line follower robot with an Arduino microcontroller and IR Sensors.
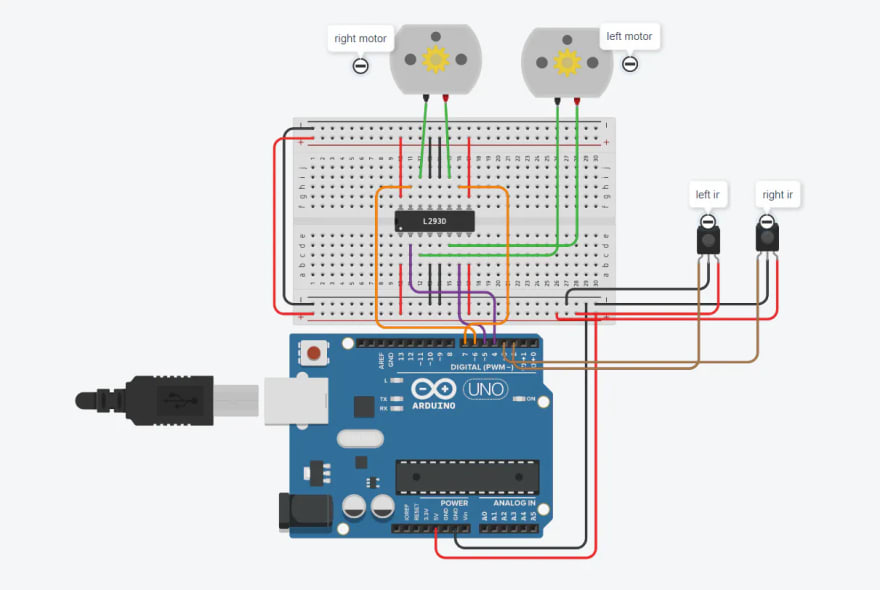
Components required
- Arduino UNO
- IR Sensor
- Gear Motors
- IC L293D
Arduino UNO
Arduino is an opensource electronics platform based on easy-to-use hardware and software. Arduino boards are able to read inputs - light on a sensor , a finger on a button , or a twitter message - and turn it into an output - activating a motor , turning on a LED , publishing something online. To do so use the Arduino programming language (based on wiring) and the Arduino Software (IDE) based on processing.
IR Sensor
An infrared sensor is an electronic device that emits and/or detects infrared radiation in order to sense some aspects of its surroundings.
Gear Motors
It is a DC motor with a gear box for decreasing the speed and increasing the torque and power . This type of motors is commonly used for robotic applications.
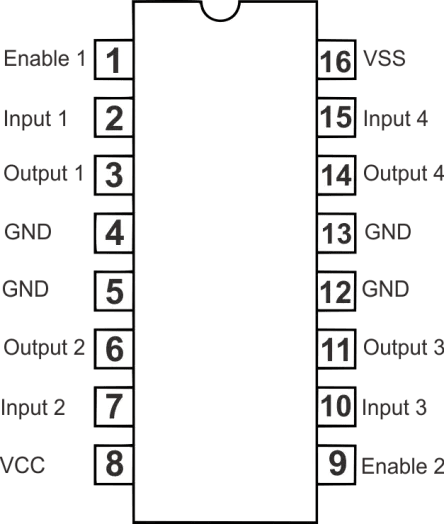
IC L293D
IC L293D is a dual H-bridge motor driver integrated circuit that can drive current of up to 600mA with voltage range of 4.5 to 36 volts.
Code
int leftir =2;int rightir = 3;int leftmotor =4;int leftmotor1 = 5;int rightmotor = 6;int rightmotor1 = 7;void setup() {Serial.begin(9600);pinMode(leftir,INPUT);pinMode(rightir,INPUT);pinMode(leftmotor,OUTPUT);pinMode(leftmotor1,OUTPUT);pinMode(rightmotor,OUTPUT);pinMode(rightmotor1,OUTPUT);}void loop() { if(digitalRead(leftir) == HIGH && digitalRead(rightir) == HIGH); { digitalWrite(leftmotor ,HIGH); digitalWrite(leftmotor1,LOW); digitalWrite(rightmotor,HIGH); digitalWrite(rightmotor1,LOW); Serial.println("FORWARD"); } if(digitalRead(leftir) == HIGH && digitalRead(rightir) == LOW); { digitalWrite(leftmotor ,HIGH); digitalWrite(leftmotor1,LOW); digitalWrite(rightmotor,LOW); digitalWrite(rightmotor1,HIGH); Serial.println("LEFT"); } if(digitalRead(leftir) == LOW && digitalRead(rightir) == HIGH); { digitalWrite(leftmotor ,LOW); digitalWrite(leftmotor1,HIGH); digitalWrite(rightmotor,HIGH); digitalWrite(rightmotor1,LOW); Serial.println("RIGHT"); } if(digitalRead(leftir) == LOW && digitalRead(rightir) == LOW); { digitalWrite(leftmotor ,LOW); digitalWrite(leftmotor1,HIGH); digitalWrite(rightmotor,LOW); digitalWrite(rightmotor1,HIGH); Serial.println("BACKWARD"); }}Original Link: https://dev.to/ndrohith/black-line-follower-with-arduino-4mje
Dev To
More About this Source Visit Dev To